Tehtud tööd
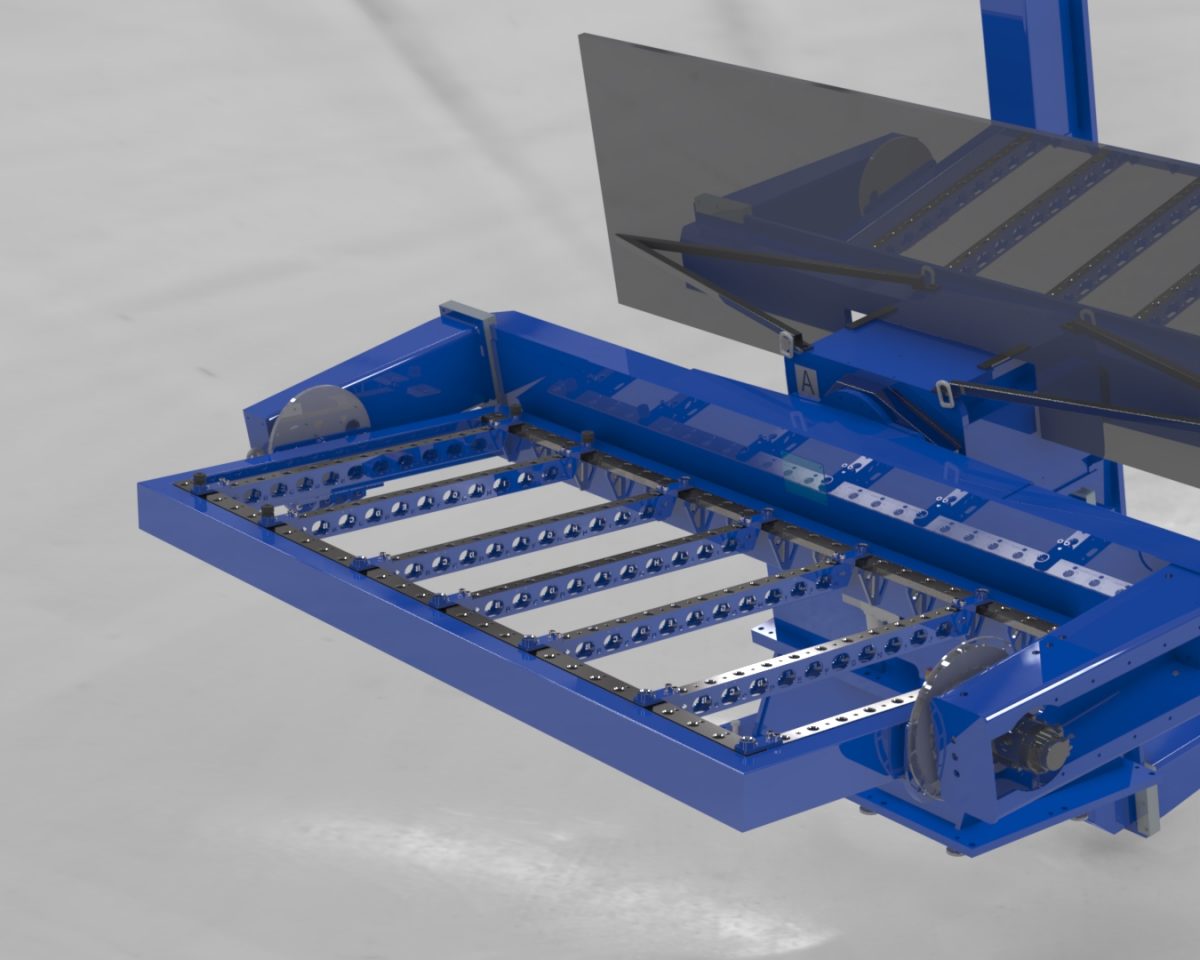
Keevituslaud TORM metall oü
- Seadistusaja vähendamiseks kasutatakse standardseid sigmund kiirkinnitus-polte.
- Laua tsenter on liigutatud arvestatuna kogu kontruktsiooni, rakiste, toodete raskuskeset, manipulaatori maksimaalset lubatud pöördemomenti täiskoormatud laua puhul ning roboti ligipääsetavust laua erinevates asendites.
- Et töölaud koos rakistega ei ületaks manipulaatori kandevõimet on nii talad, kui raam konstrueeritud maksimaalselt kergetena ilma oluliselt jäikust kaotamata
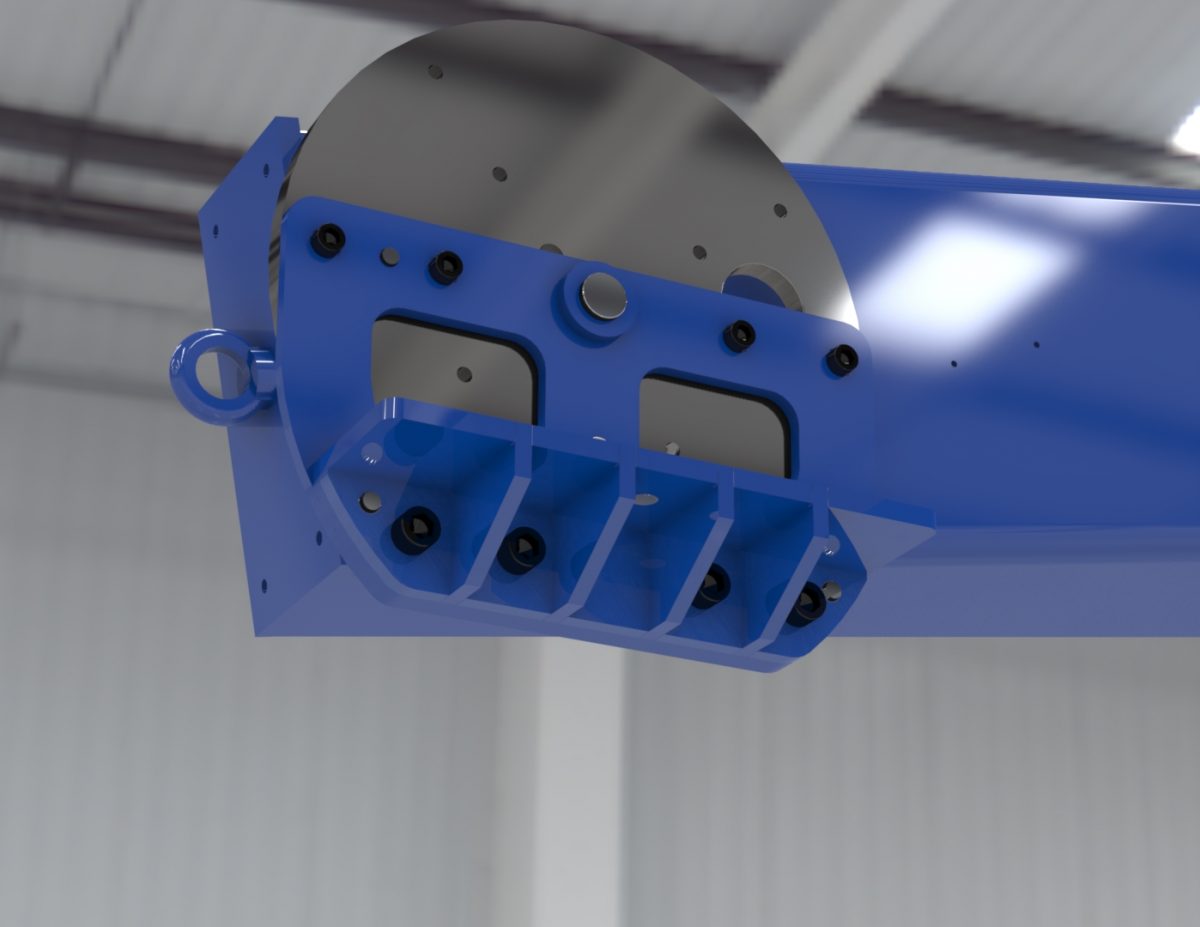
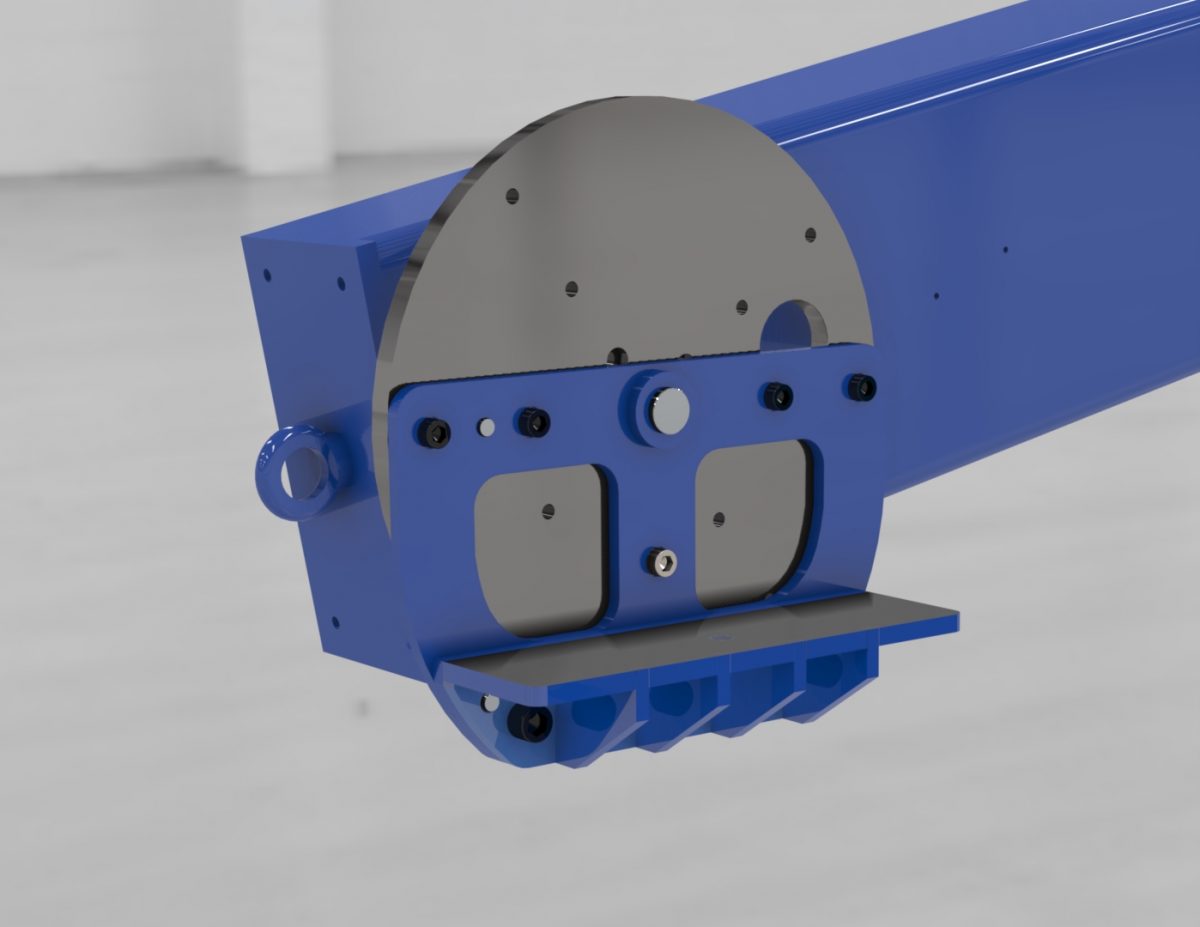
- Laua ristseis otsaflantsidega on rangelt ristis, mis välistab otsaflantside väädumise pööramisel.
- Kogu konstruktsiooni ühendused tehtud tiftidega, mis garanteerib lahtivõtmise ja taas kokkupaneku puhul varasema positsiooni ja nurga. Ning eelnevalt programeeritud programmide taaskasutatavuse.